Robot-gąsienica, który żywi się światłem
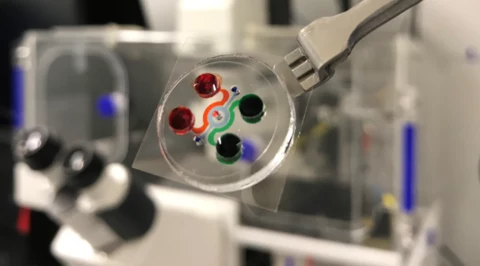
Badacze z Wydziału Fizyki Uniwersytetu Warszawskiego, przy użyciu technologii światłoczułych elastomerów rozwiniętej pierwotnie w Instytucie LENS we Florencji, zademonstrowali mikrorobota naśladującego ruch gąsienicy. 15-milimetrowej długości robot czerpie energię oraz jest sterowany przy pomocy modulowanej wiązki lasera. Oprócz poruszania się po płaskim podłożu potrafi wspinać się na pochyłości, przeciskać przez wąskie szczeliny i transportować obiekty nawet sześć razy cięższe niż on sam.


Od co najmniej pół wieku inżynierowie i naukowcy konstruują roboty, które usiłują naśladować rozmaite sposoby poruszania się zwierząt. Większość z nich opiera się na konstrukcjach ze sztywnych elementów połączonych stawami, poruszanych przez elektryczne bądź pneumatyczne elementy wykonawcze. Tymczasem ogromna liczba żywych organizmów - na przykład ślimaki na lądzie czy ośmiornice w wodzie - nie posiada szkieletu i świetnie przemieszcza się, również w trudnych warunkach, wykorzystując deformacje miękkiego ciała.
Próby budowania elastycznych robotów były dotychczas ograniczone przez trudności w zasilaniu ich oraz kontrolowaniu ich ruchu - dostępne mechanizmy wykonawcze ograniczają typowe wymiary do dziesiątek centymetrów. Dopiero użycie nowych ,,inteligentnych materiałów", w tym ciekłokrystalicznych elastomerów, otworzyło możliwości projektowania i budowania robotów wielkości owadów, a nawet jeszcze mniejszych. Dzięki odpowiedniemu uporządkowaniu (orientacji) cząsteczek elastomeru może on odwracalnie zmieniać kształt, kiedy oświetlamy go wiązką lasera. Umożliwia to zdalne zasilanie i sterowanie robota, nawet bardzo małego, przy pomocy światła.
Wykorzystując technologię światłoczułych elastomerów opracowanych we współpracy z Instytutem LENS we Florencji, badacze z Wydziału Fizyki Uniwersytetu Warszawskiego zbudowali pierwszego na świecie robota, który porusza się naśladując ruch gąsienicy w naturalnej skali. Oprócz pełzania po płaskim podłożu, oświetlany wiązką lasera 15-milimetrowej długości robot może też wspinać się na pochyłości, przeciskać przez wąskie szczeliny i transportować obiekty nawet sześć razy cięższe niż on sam, popychając je przed sobą.
- Projektowanie robotów z miękkich elastomerów wymaga całkowitej zmiany sposobu myślenia o mechanice, zasilaniu i sterowaniu - mówi Piotr Wasylczyk z Pracowni Nanostruktur Fotonicznych, który kierował projektem. - Przyglądamy się rozwiązaniom, które powstały w toku ewolucji i próbujemy je, na razie dość nieudolnie, naśladować w laboratorium. W naszych badaniach biorą udział studenci już od pierwszych lat studiów na Wydziale Fizyki. Pierwszym autorem publikacji w Advanced Optical Materials jest Mikołaj Rogóż, który właśnie obronił pracę licencjacką na temat ciekłokrystalicznych elastomerów.
Naukowcy mają nadzieję, że nowa generacja elastomerów umożliwi im niedługo zbudowanie robotów pływających na i pod powierzchnią wody, a nawet mikro-lotników. Badania nad mikrostrukturami o interesujących własnościach optycznych i opto-mechanicznych są finansowane przez Narodowe Centrum Nauki w ramach projektu "Światło na rzadziej uczęszczanych ścieżkach - optyka trójwymiarowych struktur fotonicznych".