

Wszystko o cyberrybie
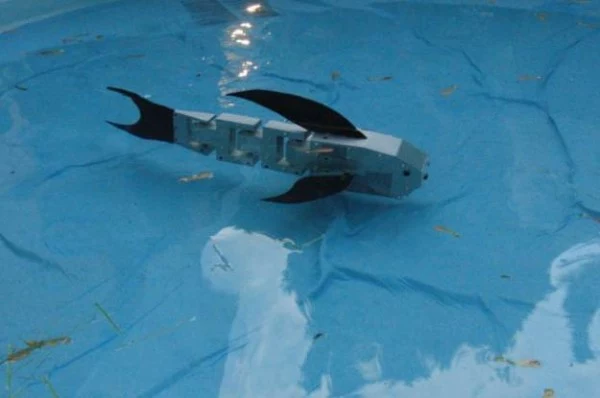
Cyberryba to pierwszy polski robot pływający, sposobem poruszania przypominający żywą rybę. O tym, jak powstawało to niezwykłe urządzenie i do czego można je wykorzystać, rozmawialiśmy z jednym z jego twórców, Marcinem Malcem.

Dlaczego wybraliście akurat rybę?
- Pomysł zrodził się na zajęciach z bioniki na trzecim roku studiów. Wtedy tematem naszego projektu było stworzenie konstrukcji, która będzie przenosiła jakieś zasady ze świata natury. Ja wpadłem na pomysł, by zrobić rybę. Skontaktowałem się z Marcinem Morawskim i opisaliśmy projekt. Potem sprawa ucichła, ale po czwartym roku studiów przez wakacje zbudowałem model. Potem razem z Marcinem Morawskim i Dominikiem Wojtasem postanowiliśmy, że zbudujemy kolejny model, ale ponieważ nie znaliśmy dokładnie środowiska wodnego, więc kołysał się na boki i tonął.
- Nauczeni doświadczeniem, zbudowaliśmy nową rybę. Ja byłem odpowiedzialny za część mechaniczną, za tworzenie konstrukcji, zapewnienie szczelności, odpowiednie zrównoważenie, zapewnienie możliwości zanurzania i wynurzania tej ryby, odpowiednie rozmieszczenie poszczególnych elementów. Marcin Morawski odpowiadał za stworzenie części elektronicznej, natomiast Dominik Wojtas był odpowiedzialny za napisanie odpowiednich aplikacji.

- Jedną z funkcji cyberryby jest tryb podążania za czerwonym obiektem. W przedzie jej głowy znajduje się kamera bezprzewodowa, dzięki czemu przez cały czas do komputera wysyłany jest obraz wideo. Specjalny program analizuje obraz, szuka czerwonego obiektu i wylicza współrzędne jego środka. Jeżeli wykryje obiekt po lewej stronie, to każe podążać rybie w lewo, jeżeli jest po prawej, każe jej płynąć w prawo.
- Ten ostatni tryb nie jest jeszcze dopracowany, bo projekt powstawał za nasze pieniądze i użyliśmy najtańszej kamery bezprzewodowej, która ma bardzo wąski kąt widzenia.
Jakie jeszcze tryby sterowania posiada cyberryba?
- Jednym z nich jest tryb autonomiczny: jeżeli przez 60 sekund nie dostaje sygnału sterującego, to włącza czujniki umiejscowione z boków i przodu głowy oraz czujniki rozpoznające dno. Jeżeli coś znajduje się w odległości 5 cm od głowy, ryba wykonuje gwałtowny zwrot w lewo lub w prawo, żeby ominąć tę przeszkodę. W tym trybie ryba losuje sobie kierunek, prędkość i głębokość zanurzenia. Jeżeli "zobaczy" jakiś przedmiot, to usiłuje go ominąć.
Nauka dla najmłodszych
Tysiące osób przybyły na największą w naszym kraju imprezę popularno-naukową. Odbywający się w Warszawie po raz czternasty Piknik Naukowy, to przede wszystkim edukacja i rozrywka dla dzieci i młodzieży. W ponad stu namiotach różne instytucje, szkoły i ośrodki naukowe kusiły zwiedzających różnorodnymi atrakcjami, eksperymentami i pokazami.








- Kolejnym trybem jest tryb sterowania za pomocą komputera. W naszej aplikacji, stworzonej przez Dominika Wojtasa, klikamy na klawiaturze strzałkami w lewo, w prawo, szybciej, wolniej i wtedy ryba otrzymuje sygnał sterujący, po czym odsyła sygnał w drugą stronę, np. "skręciłam w lewo", "skręciłam w prawo", i pływa tak, jak chcemy.
- Unowocześnieniem tego trybu jest aplikacja do telefonu komórkowego. Jej działanie polega na tym, że wysyłamy z telefonu komórkowego sygnał, po czym jest on odbierany przez bluetooth w komputerze i komputer przekierowuje sygnał do ryby.
Czy taka ryba to jest tylko zabawka, czy też może mieć jakieś praktyczne zastosowania?
- Często pada takie pytanie. Ja odpowiem tak: przed Nocą Robotów odbyła się w Polskim Radiu rozmowa dwóch profesorów z PIAP (Przemysłowy Instytut Automatyki i Pomiarów - red.). Podczas dyskusji spytano jednego z nich o to samo i on stwierdził, że piętnaście czy dziesięć lat temu, kiedy zaczynało się tworzenie robotów w PIAP, ludzie również pytali, czy to jest zabawka, po co to jeździ, a teraz na tej samej bazie powstały roboty, które pomagają żołnierzom w Afganistanie. Może więc kiedyś ta ryba też się doczeka takich samych zastosowań...
- Ze swojej strony mogę jeszcze dodać, że wszystko zależy od finansów. Jeżeli będziemy mieli małe środki, to możemy zrobić taką zabawkę, która będzie podobna do ryby. A jeżeli włoży się w to duże pieniądze, to możliwości jest wiele.
Na czym polega przewaga waszej ryby nad innymi?
- Przede wszystkim chodzi o napęd falowy. Natura wybrała go w trakcie ewolucji jako napęd idealny. Dodatkowo taką rybę możemy zanurzać i wynurzać bez mącenia wody przez śruby napędowe, jak to jest w przypadku innych robotów, które do ruchu pionowego włączają łopatki wirników. Wtedy woda zostaje zmącona i kamera już nic nie może widzieć. A nasz robot unosi się lub opada w miejscu.

Dzięki pęcherzom pławnym, tak?
- Tak, dzięki pęcherzom pławnym, a dodatkowo jeszcze dzięki zmianie geometrii płetw bocznych, co powoduje, że gdy ryba płynie, może się unosić szybciej lub wolniej. Jest jeszcze taki ciekawy ciężarek, który się przesuwa do przodu i do tyłu, dzięki czemu, gdy ryba opada, to opada głową w dół, a gdy się wynurza, robi to głową do góry.
Czy takiego robota można by wykorzystać do automatycznego sprzątania akwariów, tak jak roboty-odkurzacze sprzątają mieszkania? Czy widzicie swoją rybę w takiej roli?
- Powrócę do tej odpowiedzi: wszystko zależy od kosztów. Człowiek poleciał w kosmos i dało się? Dało, tylko pozostaje kwestia, ile to kosztowało, ilu ludzi i ile czasu temu poświęciło. Oczywiście, do takiej sprzątającej ryby musiałaby być jakaś szczotka, jakaś przyssawka czy pompa, która pozwoliłaby na sprzątanie drogą filtracji. Byłoby to oczywiście możliwe, ale taka czynność pochłaniałaby bardzo dużo energii.
Inwazja robotów na Warszawę
Łazik marsjański MAGMA, wyścigi antyterrorystycznych SCOUTÓW, taniec robotów przemysłowych, CyberRyba i samodzielnie myślący robot QFix - to tylko niewielka część tego, co czekało na gości Nocy Robotów w siedzibie Przemysłowego Instytutu Automatyki i Pomiarów w Warszawie. Więcej szczegółów o Nocy Robotów










- Ale z bardziej ambitnych projektów, do których można by rybę wykorzystać, warto sobie wyobrazić zastosowania w ratownictwie wodnym. Kiedy nurkowie poszukują na przykład jakiejś osoby w wodzie, to płetwami automatycznie powodują, że ta woda jest mętna,a przy tym nurek patrzy tylko własnymi oczami. Naszej rybie możemy kazać popłynąć w jakieś miejsce i na przykład szukać czegoś na obszarze 10 metrów kwadratowych. I możemy do tego zastosować zwykłą kamerę, albo na przykład kamerę na podczerwień czy echosonar.
Cyberryba wygląda i zachowuje się podobnie do prawdziwej ryby. Czy robiliście jakieś testy, jak inne ryby na nią reagują?
- Jeszcze nie robiliśmy takich testów. Chcielibyśmy je zrobić i pewnie zrobimy, ale już nie na tej konstrukcji tylko na następnej. Ta konstrukcja jest zrobiona za bardzo małe pieniądze, głównie z naszych własnych funduszy. Teraz chcemy zbudować innego robota.
Czym będzie się on różnił od obecnej konstrukcji? Będzie większy, będzie miał inne możliwości?
- Nie mogę zdradzać szczegółów konstrukcyjnych, mogę tylko powiedzieć, że ten robot, nad którym teraz pracujemy, będzie całkowicie podobny do półtorakilogramowego karpia.
W jakich warunkach cyberryba może pływać? Do jakiej głębokości może się zanurzyć?
- Tuż przed Nocą Robotów testowaliśmy rybę w takim małym basenie, na głębokościach do 75-80 cm. No i rybka do tej głębokości bez problemów pływała. Nie traciła zasięgu sterowania do 10 m, choć wizja urywa się trochę szybciej, bo wyposażona jest w zwykłą, tanią kamerę. Ale ogólnie rzecz biorąc zanurzała się, wynurzała, działała dobrze.
- Cyberryba to jeszcze konstrukcja, którą ciężko nazwać prototypem. To jest taki prototyp prototypu. Przy takich funduszach więcej się nie da zrobić, ale jestem bardzo zadowolony z tego, co udało nam się osiągnąć. Naszym celem było po prostu zdobycie tytułu magistra inżyniera, a to, co się stało później, przerosło nasze najśmielsze oczekiwania.

A jak się czujecie z całym tym zainteresowaniem, które wokół was się buduje? Czy jesteście zadowoleni, czy raczej was to denerwuje?
- Spotkaliśmy się z wieloma bardzo pozytywnymi komentarzami, zarówno na naszej stronie, jak na innych stronach internetowych. Bardzo ciepło zostaliśmy przyjęci przez telewizję. To nam niewątpliwie pomaga w poszukiwaniu kontaktów, chociaż wciąż nie znaleźliśmy sponsora.
- Ale zyskaliśmy dodatkowe pieniądze dzięki temu, że zostaliśmy laureatami konkursu "Młody naukowiec - kreator rzeczywistości gospodarczej" realizowanego przez Centrum Transferu Technologii na Politechnice Krakowskiej. Dzięki temu uzyskaliśmy 50 tys. zł na realizację projektu wdrożeniowego. I sądzę, że ten rozgłos też wpłynął na wynik tego konkursu.
A tak przyziemnie: czy myślicie, że na tym pomyśle można zarobić?
- Wierzymy w to. Mamy jeszcze upór, mamy kilka ciekawych innych pomysłów i wierzymy, że uda nam się zrealizować nasze marzenia.
Rozmawiał: Stanisław Janikowski







